PRYSTINE
Echtzeitsignalverarbeitung verteilter Radarsysteme im Bereich des autonomen Fahrens
Real-time signal processing of distributed radar systems in the field of autonomous driving

BMBF Logo
Title of the overall project: Programmable Systems for Intelligence in Automobiles
Project start: 16/06/2018
Acronym: PRYSTINE
Funders: Bundesministerium für Bildung und Forschung (BMBF)
Abstract
On May 1, 2018, the research and innovation project PRYSTINE started, under joint funding of the European Union by ECSEL and the national governments of the ECSEL member states. The Chair of Technical Electronics represents FAU in the consortium of over 50 European partners.
Among the real trends that will impact society in the coming years, autonomous driving stands out in particular for its potential to change the automotive industry as we know it today. Subsequently, this will also strongly influence the semiconductor industry and open up new market opportunities, as semiconductors play an indispensable role as “enablers” for autonomous vehicles. Autonomous driving has been identified as one of the most important prerequisites for meeting the societal challenges of safe, clean and efficient mobility. To achieve this, fail-safe behavior is essential to handle safety-critical situations on its own. This is not achieved with current approaches, in part due to a lack of reliable environment awareness and insufficient sensor fusion.
In the project titled “Programmable Systems for Intelligence in Automobiles” (PRYSTINE), the general goal is to realize a robust and fail-safe all-around perception of the environment of vehicles. By means of robust sensor data fusion of radar, LiDAR and camera data, as well as fail-safe control functions, autonomous driving in urban and rural environments should be made possible as safely as possible.
At the Chair of Technical Electronics, robust environmental sensing and imaging using MIMO radar sensors will be performed within the framework of PRYSTINE. Different influences and scenarios, such as radio interference or detection in the near field for automotive radars, will be considered. Furthermore, parts of the traditional radar signal processing chain, from interference reduction to detection, classification and tracking of road users, will be gradually replaced by machine learning.
Complete information about this project can be found on the official website: www.prystine.eu .
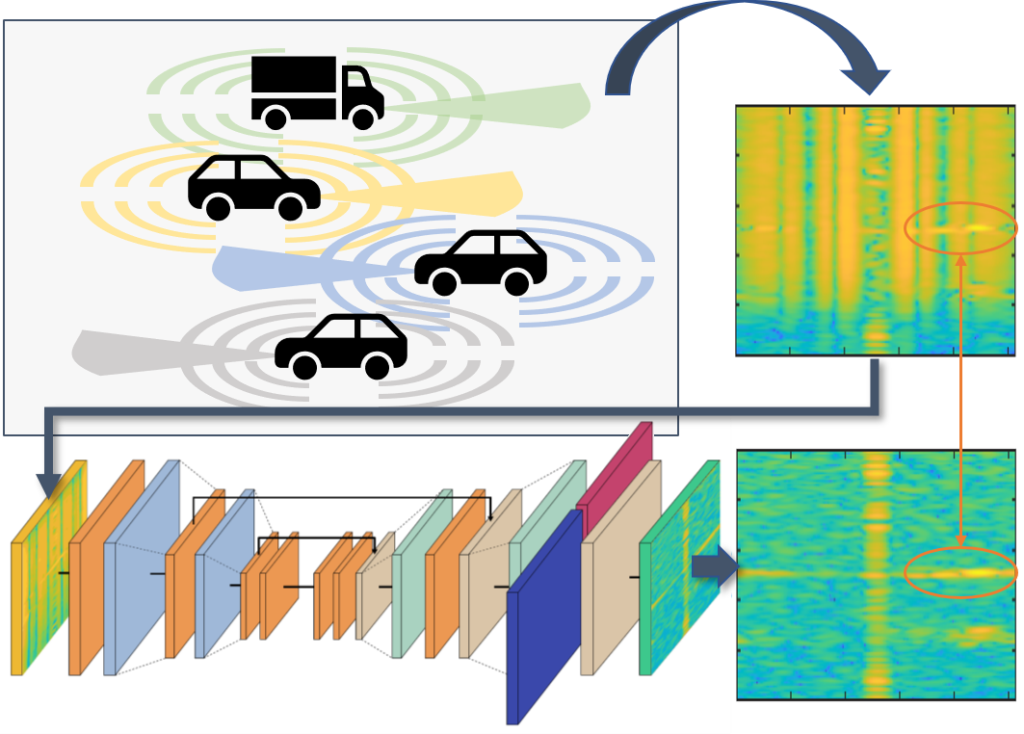
Konzept zur Interferenzreduzierung mit Maschinellem Lernen
Publications
- , , , , :
Automotive Radar Interference Mitigation using a Convolutional Autoencoder
2020 International Conference on Radar (RADAR) (Washington DC, 27/04/2020 - 01/05/2020)
DOI: 10.1109/RADAR42522.2020.9114641
BibTeX: Download - , , :
Single-Snapshot Direction-of-Arrival Estimation of Multiple Targets using a Multi-Layer Perceptron
2019 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM) (Detroit, MI, 15/04/2019 - 16/04/2019)
DOI: 10.1109/ICMIM.2019.8726554
BibTeX: Download - , , :
Model Order Estimation using a Multi-Layer Perceptron for Direction-of-Arrival Estimation in Automotive Radar Sensors
2019 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet) (Orlando, Florida, 20/01/2019 - 23/01/2019)
DOI: 10.1109/WISNET.2019.8711806
BibTeX: Download - , , , , :
Generative Adversial Network based Extended Target Detection for Automotive MIMO Radar
2020 International Conference on Radar (RADAR) (Washington DC, 27/04/2020 - 01/05/2020)
DOI: 10.1109/RADAR42522.2020.9114564
BibTeX: Download - , , , , :
Uncertainty analysis of deep neural network for classification of vulnerable road users using micro-doppler
2020 IEEE Topical Conference on Wireless Sensors and Sensor Networks, WiSNeT 2020 (San Antonio, TX, 26/01/2020 - 29/01/2020)
In: 2020 IEEE Topical Conference on Wireless Sensors and Sensor Networks, WiSNeT 2020 2020
DOI: 10.1109/WiSNeT46826.2020.9037574
BibTeX: Download

PRYSTINE Logo